 目录
目录Python全系列 教程
3567个小节阅读:5929k
目录


鸿蒙应用开发
C语言快速入门
JAVA全系列 教程
面向对象的程序设计语言
Python全系列 教程
Python3.x版本,未来主流的版本
人工智能 教程
顺势而为,AI创新未来
大厂算法 教程
算法,程序员自我提升必经之路
C++ 教程
一门通用计算机编程语言
微服务 教程
目前业界流行的框架组合
web前端全系列 教程
通向WEB技术世界的钥匙
大数据全系列 教程
站在云端操控万千数据
AIGC全能工具班

A A
White Night
提示:
YOLO:you only look once,指的是只需要浏览一次就可以识别出图中物体的类别和位置
YOLO v1将输入图像划分为S * S的网格(Grid),每个网格预测两个边界框,如果目标
物体的中心落入相应的网格中,那么该网格就负责检测出该目标物体。
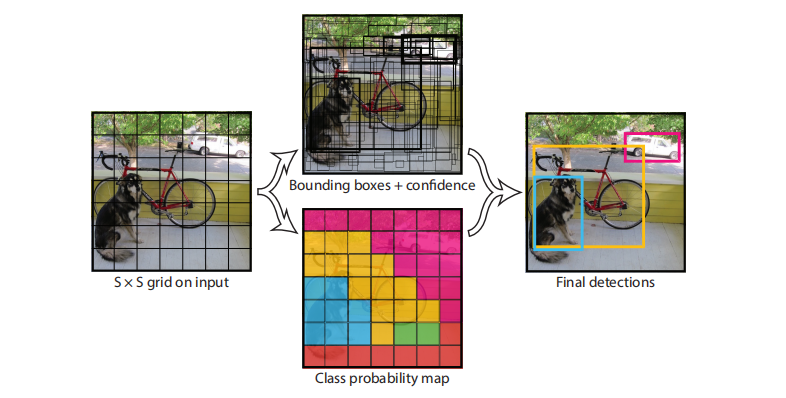
图像划分
1号图中显示图片被分为 7 × 7 = 49个grid cell
2号图中显示每个grid cell生成2个边界框,一共98个边界框
3号图中用不同颜色表示每个grid cell所预测的物体最可能的分类,如蓝色的grid cell
生成的边界框最可能框住的是狗、黄色的grid cell最可能预测自行车…
4号图为最终输出的显示效果
边界框预测
每一个网格预测2个边界框,每个边界框有四个坐标和一个置信度(confidence),所以最
终的预测结果是 7 × 7 × (2 ∗ 5 + 类别数量)个向量
第二个class probablity map,这一路的工作其实是和上一步是同时进行的,负责的是
网格(gird cell)类别的分数,预测的结果放在最后的张量中
由于一个网格只能预测两个边界框,这使得YOLO v1对密集的小物体的检测效果并不好
1. 关于YOLO v1,下列说法正确的是:
A YOLO v1属于Two-Stage
B 一个网格预测一个边界框
C 如果目标物体的中心落入相应的网格中,那么该网格就负责检测出该目标物体
D 以上说法均不正确
2. YOLO v1的最大不足之处是:
A 需要产生候选区域
B 对密集的小物体的检测效果并不好
C 检测速度慢
D 以上说法均不正确
1=>C 2=>B